Semana 2¶
Esta semana comenzaremos a explorar conceptos avanzados de programación de sistemas embebidos. En particular, mediante el uso de sistemas operativos de tiempo real (RTOS); sin embargo, antes de comenzar a utilizar las abstracciones que un RTOS nos ofrece, debemos comprender cómo funciona.
Objetivos¶
- Entender cómo funciona un sistema operativo de tiempo real.
- Programar utilizando tareas.
Algo de teoría¶
Los RTOS son una evolución de la arquitectura de programación clásica backgroud/foreground tan conocida por
nosotros (si, arduino). La idea entonces de un RTOS es ofrecernos un ambiente de programación con múltiples background
funcionando de manera concurrente, es decir, es como tener un programa de arduino con múltiples ciclos loop()
concurrentes.
El siguiente código muestra un ejemplo típico de una arquitectura background/foreground:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 | // background code:
#include <stdint.h>
#include "bsp.h"
int main() {
BSP_init();
while (1) {
BSP_ledGreenOn();
BSP_delay(BSP_TICKS_PER_SEC / 4U);
BSP_ledGreenOff();
BSP_delay(BSP_TICKS_PER_SEC * 3U / 4U);
}
return 0;
}
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 | // foreground code: blocking version
#include <stdint.h> /* Standard integers. WG14/N843 C99 Standard */
#include "bsp.h"
#include "TM4C123GH6PM.h" /* the TM4C MCU Peripheral Access Layer (TI) */
/* on-board LEDs */
#define LED_BLUE (1U << 2)
static uint32_t volatile l_tickCtr;
void SysTick_Handler(void) {
++l_tickCtr;
}
void BSP_init(void) {
SYSCTL->RCGCGPIO |= (1U << 5); /* enable Run mode for GPIOF */
SYSCTL->GPIOHBCTL |= (1U << 5); /* enable AHB for GPIOF */
GPIOF_AHB->DIR |= (LED_RED | LED_BLUE | LED_GREEN);
GPIOF_AHB->DEN |= (LED_RED | LED_BLUE | LED_GREEN);
SystemCoreClockUpdate();
SysTick_Config(SystemCoreClock / BSP_TICKS_PER_SEC);
__enable_irq();
}
uint32_t BSP_tickCtr(void) {
uint32_t tickCtr;
__disable_irq();
tickCtr = l_tickCtr;
__enable_irq();
return tickCtr;
}
void BSP_delay(uint32_t ticks) {
uint32_t start = BSP_tickCtr();
while ((BSP_tickCtr() - start) < ticks) {
}
}
void BSP_ledGreenOn(void) {
GPIOF_AHB->DATA_Bits[LED_GREEN] = LED_GREEN;
}
void BSP_ledGreenOff(void) {
GPIOF_AHB->DATA_Bits[LED_GREEN] = 0U;
}
|
Es importante notar que el código anterior es bloqueante (Pregunta Juanito: ¿Qué es eso?). La función
BSP_delay(BSP_TICKS_PER_SEC / 4U); consume todos los recursos de la CPU en espera ocupada. A esto también lo llamamos
polling.
¿Cómo superamos la espera ocupada? Utilizando la excelente técnica de programación conocida como máquinas de estado:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 | // background code: non-blocking version
int main() {
BSP_init();
while (1) {
/* Blinky polling state machine */
static enum {
INITIAL,
OFF_STATE,
ON_STATE
} state = INITIAL;
static uint32_t start;
switch (state) {
case INITIAL:
start = BSP_tickCtr();
state = OFF_STATE; /* initial transition */
break;
case OFF_STATE:
if ((BSP_tickCtr() - start) > BSP_TICKS_PER_SEC * 3U / 4U) {
BSP_ledGreenOn();
start = BSP_tickCtr();
state = ON_STATE; /* state transition */
}
break;
case ON_STATE:
if ((BSP_tickCtr() - start) > BSP_TICKS_PER_SEC / 4U) {
BSP_ledGreenOff();
start = BSP_tickCtr();
state = OFF_STATE; /* state transition */
}
break;
default:
//error();
break;
}
}
//return 0;
}
|
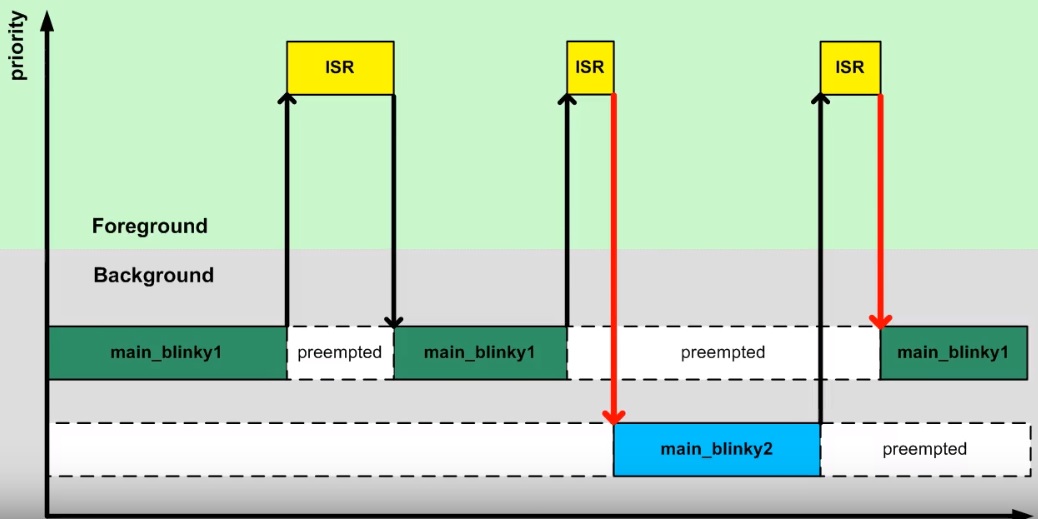
En ambos códigos, espera ocupada y máquinas de estado, la arquitectura background/foreground se puede entender como ilustra la figura:
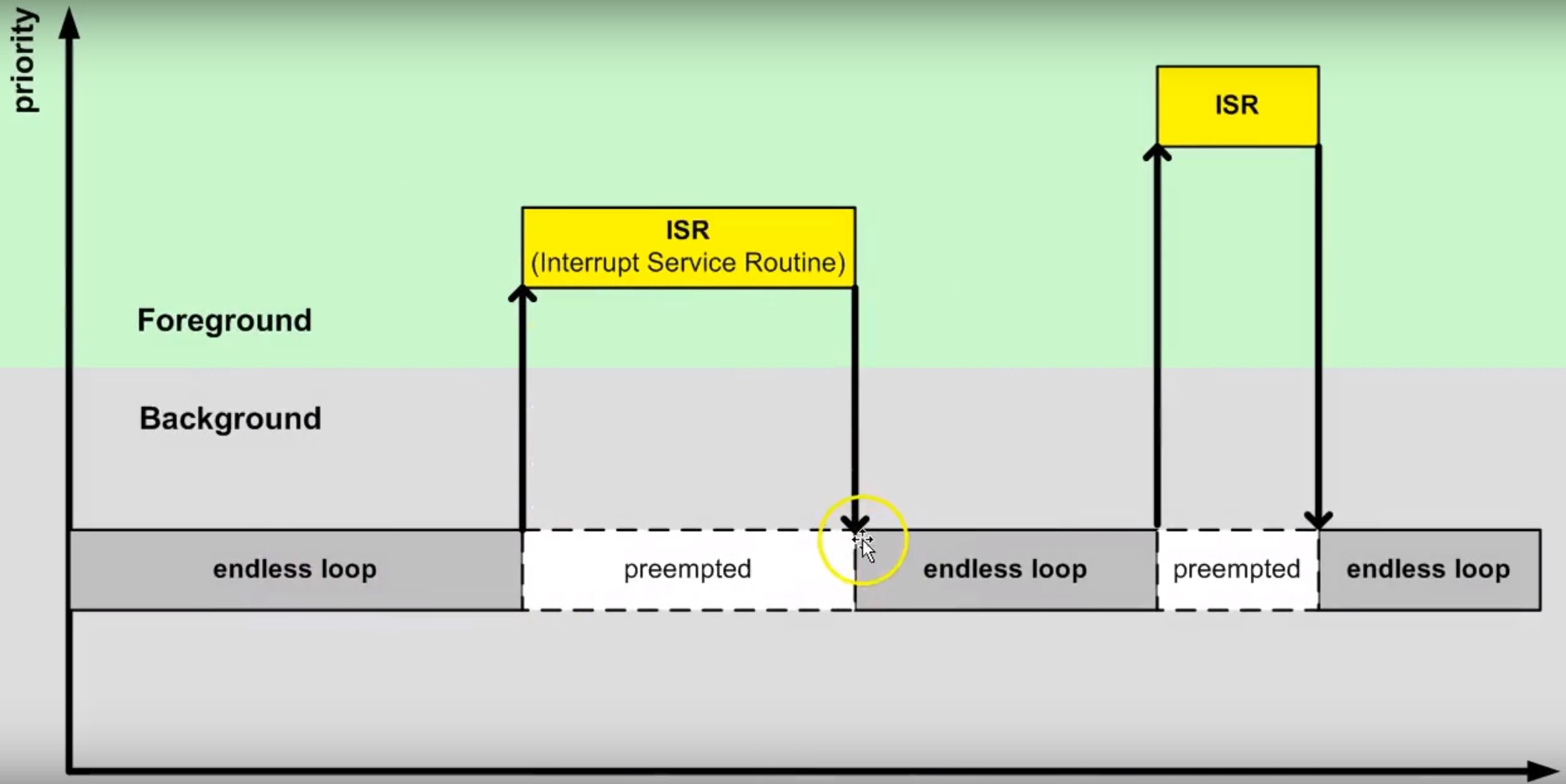
El código que enciende y apaga el LED corre en el background. Cuando ocurre la interrupción SysTick_Handler el
background será “despojado” de la CPU de la cual se apropiará (preemption) el servicio de atención a
la interrupción o ISR en el foreground. Una vez termine la ejecución de la ISR, el backgound retomará justo en el
punto en el cual fue “desalojado” (preempted). Note también que la comunicación entre el background/foreground se realiza
por medio de la variable l_tickCtr. Adicionalmente, observe como la función BSP_tickCtr accede la variable.
Pregunta Juanito: ¿Por qué se hace de esa manera? Para evitar las condiciones de carrera.
¿Qué son las condiciones de carrera?¶
Son condiciones que se presentan cuando dos entidades concurrentes compiten por un recurso haciendo que el estado del recurso dependa de la secuencia en la cual se accede. El siguiente ejemplo ilustrará este asunto:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 | #include "TM4C123GH6PM.h"
#include "bsp.h"
int main() {
SYSCTL->RCGCGPIO |= (1U << 5); /* enable Run mode for GPIOF */
SYSCTL->GPIOHBCTL |= (1U << 5); /* enable AHB for GPIOF */
GPIOF_AHB->DIR |= (LED_RED | LED_BLUE | LED_GREEN);
GPIOF_AHB->DEN |= (LED_RED | LED_BLUE | LED_GREEN);
SysTick->LOAD = SYS_CLOCK_HZ/2U - 1U;
SysTick->VAL = 0U;
SysTick->CTRL = (1U << 2) | (1U << 1) | 1U;
SysTick_Handler();
__enable_irq();
while (1) {
GPIOF_AHB->DATA = GPIOF_AHB->DATA | LED_GREEN;
GPIOF_AHB->DATA = GPIOF_AHB->DATA & ~LED_GREEN;
}
//return 0;
}
|
1 2 3 4 5 6 7 8 9 10 11 12 | /* Board Support Package */
#include "TM4C123GH6PM.h"
#include "bsp.h"
__attribute__((naked)) void assert_failed (char const *file, int line) {
/* TBD: damage control */
NVIC_SystemReset(); /* reset the system */
}
void SysTick_Handler(void) {
GPIOF_AHB->DATA_Bits[LED_BLUE] ^= LED_BLUE;
}
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 | #ifndef __BSP_H__
#define __BSP_H__
/* Board Support Package for the EK-TM4C123GXL board */
/* system clock setting [Hz] */
#define SYS_CLOCK_HZ 16000000U
/* on-board LEDs */
#define LED_RED (1U << 1)
#define LED_BLUE (1U << 2)
#define LED_GREEN (1U << 3)
#endif // __BSP_H__
|
Observemos el código generado por el compilador para las expresiones que encienden y apagan el LED verde:
1 2 3 4 5 6 7 8 9 10 11 12 | 18 GPIOF_AHB->DATA = GPIOF_AHB->DATA | LED_GREEN;
000003d4: 4B09 ldr r3, [pc, #0x24]
000003d6: F8D333FC ldr.w r3, [r3, #0x3fc]
000003da: 4A08 ldr r2, [pc, #0x20]
000003dc: F0430308 orr r3, r3, #8
000003e0: F8C233FC str.w r3, [r2, #0x3fc]
19 GPIOF_AHB->DATA = GPIOF_AHB->DATA & ~LED_GREEN;
000003e4: 4B05 ldr r3, [pc, #0x14]
000003e6: F8D333FC ldr.w r3, [r3, #0x3fc]
000003ea: 4A04 ldr r2, [pc, #0x10]
000003ec: F0230308 bic r3, r3, #8
000003f0: F8C233FC str.w r3, [r2, #0x3fc]
|
Consideremos el caso en el cual el LED azul está apagado y el LED verde encendido. El procesador comenzará a ejecutar las siguientes instrucciones que apagarán el LED verde:
1 2 3 4 5 6 | 19 GPIOF_AHB->DATA = GPIOF_AHB->DATA & ~LED_GREEN;
000003e4: 4B05 ldr r3, [pc, #0x14]
000003e6: F8D333FC ldr.w r3, [r3, #0x3fc]
000003ea: 4A04 ldr r2, [pc, #0x10]
000003ec: F0230308 bic r3, r3, #8
000003f0: F8C233FC str.w r3, [r2, #0x3fc]
|
Justo antes de ejecutar la instrucción 000003ec: F0230308 bic r3, r3, #8 ocurre una interrupción
SysTick_Handler. Dicha interrupción enciende y apaga el LED azul cada 500 ms. En este caso el LED azul se
encenderá. Por tanto, al salir de la interrupción, tanto el LED azul como el verde estarán encendidos. Tenga en cuenta
que el LED azul se apagará en 500 ms. La instrucción 000003ec: F0230308 bic r3, r3, #8 se ejecuta y sorpresivamente
ambos LEDs se apagan (Dice Juanito: ¿Qué pasó?). Acaba de presentarse una condición de carrera.
Para enteder lo anterior, debemos analizar con cuidado el contenido del registro r3 y del puerto de entrada/salida
justo antes de la ejecución de 000003ec: F0230308 bic r3, r3, #8. En ese punto r3 = 0x00000008 y
GPIOF = 0x00000008. Esto es así porque estamos leyendo en el registro r3 el contenido del puerto GPIOF y en este
momento el LED verde (bit 3) está encendido. Una vez se ejecuta la interrupción, el puerto cambia (GPIOF = 0x0000000C)
ya que tanto el LED azul como el verde están encendidos. Luego de la interrupción se ejcuta la instrucción
000003ec: F0230308 bic r3, r3, #8 haciendo r3 = 0x00000000. Note que en este momento el valor de r3 no
está considerando el estado del LED azul. En consecuencia, al ejecutar 000003f0: F8C233FC str.w r3, [r2, #0x3fc]
el puerto GPIOF tomará el valor de r3 y ambos LEDs se apagarán. (Pregunta Juanito: ¿Y cómo se puede arreglar esto?).
El problema ocurre porque la lectura del puerto, su modificación y posterior escritura NO ES ATÓMICA. Entonces para
solucionar el problema podemos atacarlo de dos maneras: haciendo que la lectura, modificación y escritura del recurso sea
atómica (“indivisible”) o evitando compartir el recurso.
Estrategia atómica:
1 2 3 4 5 6 7 8 9 | while (1) {
__disable_irq();
GPIOF_AHB->DATA = GPIOF_AHB->DATA | LED_GREEN;
__enable_irq();
__disable_irq();
GPIOF_AHB->DATA = GPIOF_AHB->DATA & ~LED_GREEN;
__enable_irq();
}
|
Estrategia no recurso compartido:
1 2 3 4 | while (1) {
GPIOF_AHB->DATA_Bits[LED_GREEN] = LED_GREEN;
GPIOF_AHB->DATA_Bits[LED_GREEN] = 0U;
}
|
La última estrategia permite acceder de manera individual y sólo con una operación de escritura los bits del puerto de entrada salida. La estrategia funciona gracias a una “jugada” en hardware. La siguiente figura muestra la implementación de los puertos de GPIO en el microcontrolador que estamos utilizando para realizar los ejemplos: TM4C123G de Texas Instruments. Note que hay una línea de dirección y de datos dedicada a cada bit del puerto de entrada salida:
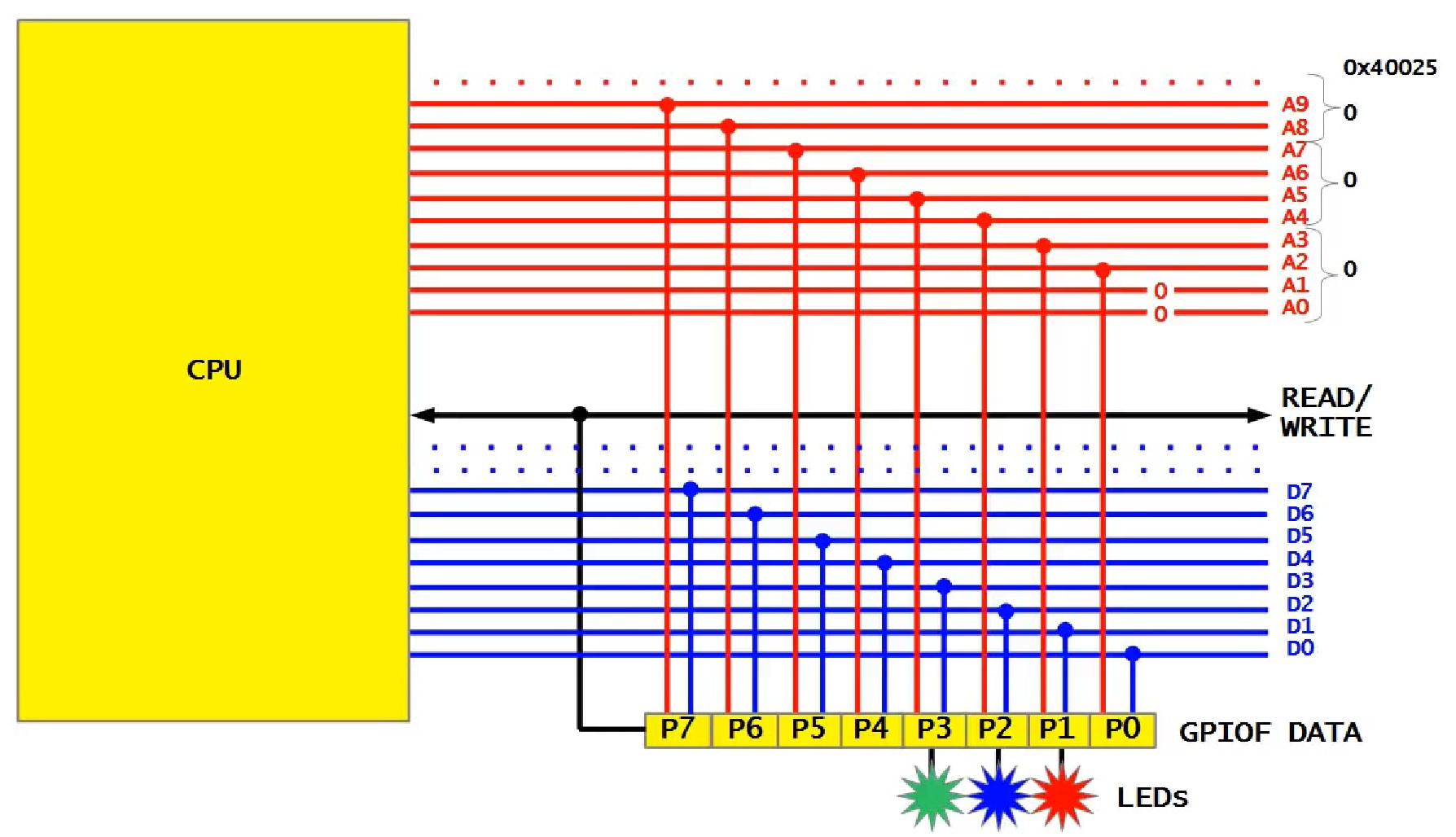
Las líneas de dirección habilitan la escritura del bit. Por tanto, si se desea escribir el bit 2 del puerto, en las
línea correspondientes del bus de direcciones debemos colocar el valor 0x010 y escribir en el bus de datos un 0x0000000004.
En los ejemplos anteriores, al ejecutar la instrucción 000003f0: F8C233FC str.w r3, [r2, #0x3fc] estamos
escribiendo el valor del registro r3 en el puerto GPIOF completo porque el valor 0x3FC en las líneas correspondientes
del bus de direcciones habilita cada bit del puerto GPIOF.
A continuación se observa el código generado por el compilador al emplear la estrategia del recurso no compartido:
1 2 3 4 | 19 GPIOF_AHB->DATA_Bits[LED_GREEN] = LED_GREEN;
000003d4: 4B0E ldr r3, [pc, #0x38]
000003d6: 2208 movs r2, #8
000003d8: 621A str r2, [r3, #0x20]
|
La instrucción ldr r3, [pc, #0x38] carga la dirección del puerto GPIOF en el registro 3 (0x4005D000), movs r2, #8
carga un 8 en r2 y finalmente str r2, [r3, #0x20] escribe un 8 en la dirección 0x4005D000 + 0x20, es decir,
se escribe un 1 en el bit 3 del puerto GPIOF correspondiente al LED verde.
El siguiente código muestra la declaración del puerto GPIOF en lenguaje C:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 | typedef struct { /*!< GPIOA Structure */
__IO uint32_t DATA_Bits[255]; /*!< GPIO bit combinations */
__IO uint32_t DATA; /*!< GPIO Data */
__IO uint32_t DIR; /*!< GPIO Direction */
__IO uint32_t IS; /*!< GPIO Interrupt Sense */
__IO uint32_t IBE; /*!< GPIO Interrupt Both Edges */
__IO uint32_t IEV; /*!< GPIO Interrupt Event */
__IO uint32_t IM; /*!< GPIO Interrupt Mask */
__IO uint32_t RIS; /*!< GPIO Raw Interrupt Status */
__IO uint32_t MIS; /*!< GPIO Masked Interrupt Status */
__O uint32_t ICR; /*!< GPIO Interrupt Clear */
__IO uint32_t AFSEL; /*!< GPIO Alternate Function Select */
__I uint32_t RESERVED1[55];
__IO uint32_t DR2R; /*!< GPIO 2-mA Drive Select */
__IO uint32_t DR4R; /*!< GPIO 4-mA Drive Select */
__IO uint32_t DR8R; /*!< GPIO 8-mA Drive Select */
__IO uint32_t ODR; /*!< GPIO Open Drain Select */
__IO uint32_t PUR; /*!< GPIO Pull-Up Select */
__IO uint32_t PDR; /*!< GPIO Pull-Down Select */
__IO uint32_t SLR; /*!< GPIO Slew Rate Control Select */
__IO uint32_t DEN; /*!< GPIO Digital Enable */
__IO uint32_t LOCK; /*!< GPIO Lock */
__I uint32_t CR; /*!< GPIO Commit */
__IO uint32_t AMSEL; /*!< GPIO Analog Mode Select */
__IO uint32_t PCTL; /*!< GPIO Port Control */
__IO uint32_t ADCCTL; /*!< GPIO ADC Control */
__IO uint32_t DMACTL; /*!< GPIO DMA Control */
} GPIOA_Type;
#define GPIOF_AHB_BASE 0x4005D000UL
#define GPIOF_AHB ((GPIOA_Type *) GPIOF_AHB_BASE)
|
Más adelante veremos que existe una tercera técnica para controlar el acceso atómico o exclusivo a los recursos compartidos. Dicha opción es ofrecida por un RTOS mediante el uso semáfaros de exclusión mutua.
Ejecución de múltiples backgound concurrentes¶
Hasta este punto hemos ilustrado dos tipos de arquitecturas backgroud/foreground: bloqueante (espera ocupada) y no bloqueante (máquinas de estado). En este punto vamos a concentrarnos en evulucionar la versión bloqueante. Para ello, “intentaremos” crear un programa, bloqueante, que encienda y apague dos LEDs de manera independiente y concurrente. El siguiente código ilustra una intento de conseguir lo anterior:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 | #include <stdint.h>
#include "bsp.h"
int main() {
volatile uint32_t run = 0U;
BSP_init();
while (1) {
BSP_ledGreenOn();
BSP_delay(BSP_TICKS_PER_SEC / 4U);
BSP_ledGreenOff();
BSP_delay(BSP_TICKS_PER_SEC * 3U / 4U);
BSP_ledBlueOn();
BSP_delay(BSP_TICKS_PER_SEC / 2U);
BSP_ledBlueOff();
BSP_delay(BSP_TICKS_PER_SEC / 3U);
}
//return 0;
}
|
Al ejecutar este código claramente se observa que los LEDs no están funcionando de manera concurrente e independiente. Por tanto, el siguiente evento sería tener dos ciclos:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 | void main_blinky1() {
while (1) {
BSP_ledGreenOn();
BSP_delay(BSP_TICKS_PER_SEC / 4U);
BSP_ledGreenOff();
BSP_delay(BSP_TICKS_PER_SEC * 3U / 4U);
}
}
void main_blinky2() {
while (1) {
BSP_ledBlueOn();
BSP_delay(BSP_TICKS_PER_SEC / 2U);
BSP_ledBlueOff();
BSP_delay(BSP_TICKS_PER_SEC / 3U);
}
}
int main() {
volatile uint32_t run = 0U;
BSP_init();
if(run){
main_blinky1();
}
else{
main_blinky2();
}
//return 0;
}
|
Al ejecutar este código claramente se observa que sólo se ejecuta la función main_blinky2. Vamos a analizar en detalle
cómo es el funcionamiento de este programa. Para ello vamos a detener la ejecución del programa justo antes de retornar de
la interrupción SysTick_Handler`. La figura muestra el contenido del los registros del procesador, el stack frame y
el contenido del stack.
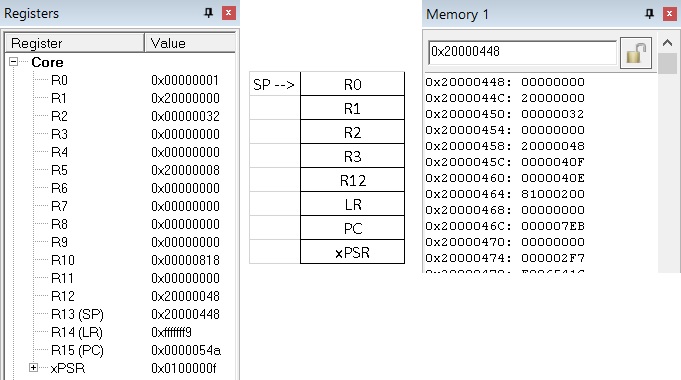
Según el stack frame y el contenido del stack, al retornar de la interrupción el programa debe continuar en la posición
de memoria PC = 0x000004EC. De manera muy astuta pregunta Juanito: ¿Y si cambiamos a mano el valor en el stack
que será cargado en el PC al retornar de la interrupción? Esto permitiría hacer que el programa continue en cualquier
posición de memoria. La siguiente figura muestra la posición en memoria de programa de la función main_blinky1:
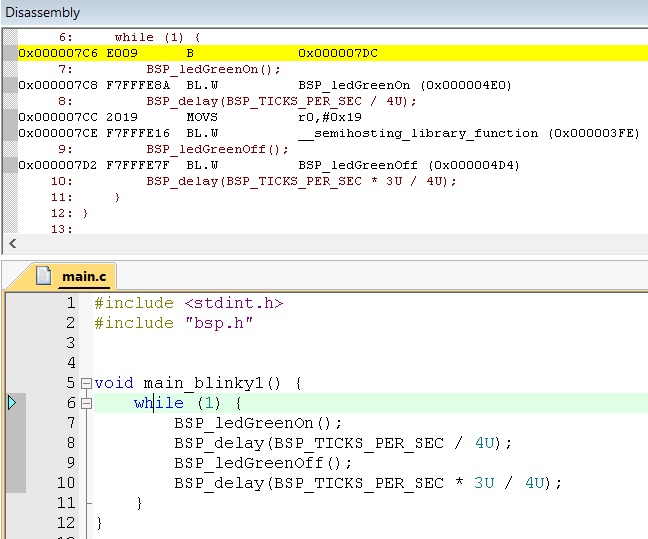
El inicio de la función está en la posición 0x000007C6. Por tanto, si modificamos la posición del stack correspondiente al PC justo antes de retornar de la interrupción, conseguiremos el efecto deseado. La siguiente figura muestra lo conseguido hasta ahora modificando de manera manual la dirección de retorno de la interrupción.
La técnica anterior es el principio sobre el cual se basan los RTOS para lograr cambiar el flujo de ejecución entre
los diferentes backgrounds disponibles. La parte del RTOS encargada de extender la arquitectura backgound/foreground
permiendo que se puedan ejecutar concurrentemente varios backgounds sobre la misma CPU se denomina kernel. A estos
múltiples backgrounds los denominamos tareas. Al proceso de cambiar frecuentemente la CPU entre mútiples tareas
creando la ilusión de que cada tarea tiene la CPU para ella sóla se denomina multitarea.
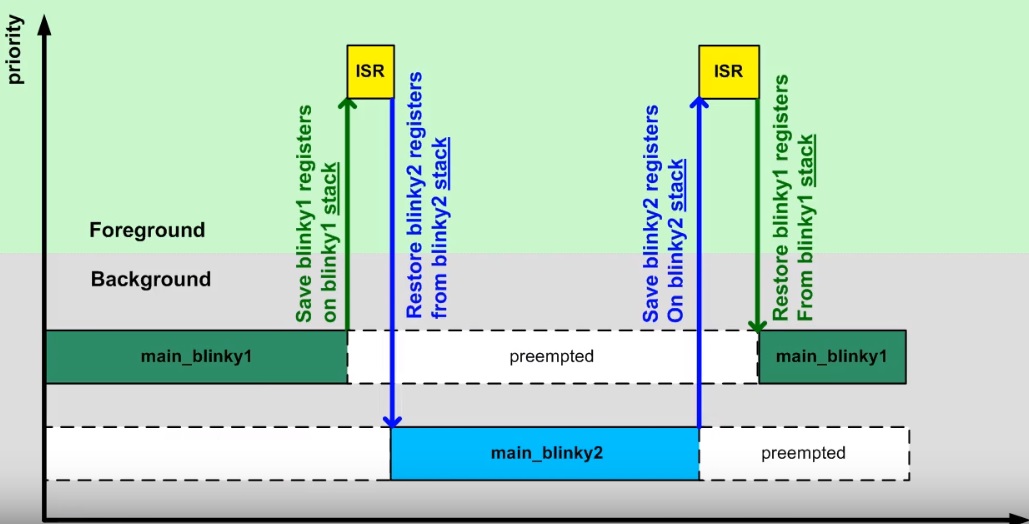
Como se señaló anteriormente, el cambio en la dirección de retorno de la interrupción es el principio de un kernel, pero
esta idea por si sola presenta un problema. Si main_blinky1 se está ejecutando y ocurre una interrupción, la CPU
salvará automáticamente los registros R0 a R3 y LR, PC y xPSR en el stack. Luego al retornar de la interrupción,
los registros serán restuardos. De esta manera la interrupción podrá hacer uso de los registros y
la función main_blinky1 podrá continuar en el punto donde fue interrumpida. Si en vez de volver a main_blinky1 el
flujo continua con main_blinky2 los registros resturados serán modificados por el código de main_blinky2 y al
retornar a main_blinky1 el estado de los registros estará corrupto. La siguiente figura ilustra el problema:

Por tanto, es necesario tener un espacio para salvar el contenido de los registros de main_blinky1, así como para main_blinky2. Si cada tarea tiene un stack propio, se puede conseguir lo que muestra la figura:
El siguiente código muestra una posible implementación para lo descrito anteriormente:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 | #include <stdint.h>
#include "bsp.h"
#include <stdint.h>
#include "bsp.h"
uint32_t stack_blinky1[40];
uint32_t *sp_blinky1 = &stack_blinky1[40];
void main_blinky1() {
while (1) {
BSP_ledGreenOn();
BSP_delay(BSP_TICKS_PER_SEC / 4U);
BSP_ledGreenOff();
BSP_delay(BSP_TICKS_PER_SEC * 3U / 4U);
}
}
uint32_t stack_blinky2[40];
uint32_t *sp_blinky2 = &stack_blinky2[40];
void main_blinky2() {
while (1) {
BSP_ledBlueOn();
BSP_delay(BSP_TICKS_PER_SEC / 2U);
BSP_ledBlueOff();
BSP_delay(BSP_TICKS_PER_SEC / 3U);
}
}
/* background code: sequential with blocking version */
int main() {
BSP_init();
/* fabricate Cortex-M ISR stack frame for blinky1 */
*(--sp_blinky1) = (1U << 24); /* xPSR */
*(--sp_blinky1) = (uint32_t)&main_blinky1; /* PC */
*(--sp_blinky1) = 0x0000000EU; /* LR */
*(--sp_blinky1) = 0x0000000CU; /* R12 */
*(--sp_blinky1) = 0x00000003U; /* R3 */
*(--sp_blinky1) = 0x00000002U; /* R2 */
*(--sp_blinky1) = 0x00000001U; /* R1 */
*(--sp_blinky1) = 0x00000000U; /* R0 */
/* additionally, fake registers R4-R11 */
*(--sp_blinky1) = 0x0000000BU; /* R11 */
*(--sp_blinky1) = 0x0000000AU; /* R10 */
*(--sp_blinky1) = 0x00000009U; /* R9 */
*(--sp_blinky1) = 0x00000008U; /* R8 */
*(--sp_blinky1) = 0x00000007U; /* R7 */
*(--sp_blinky1) = 0x00000006U; /* R6 */
*(--sp_blinky1) = 0x00000005U; /* R5 */
*(--sp_blinky1) = 0x00000004U; /* R4 */
/* fabricate Cortex-M ISR stack frame for blinky2 */
*(--sp_blinky2) = (1U << 24); /* xPSR */
*(--sp_blinky2) = (uint32_t)&main_blinky2; /* PC */
*(--sp_blinky2) = 0x0000000EU; /* LR */
*(--sp_blinky2) = 0x0000000CU; /* R12 */
*(--sp_blinky2) = 0x00000003U; /* R3 */
*(--sp_blinky2) = 0x00000002U; /* R2 */
*(--sp_blinky2) = 0x00000001U; /* R1 */
*(--sp_blinky2) = 0x00000000U; /* R0 */
/* additionally, fake registers R4-R11 */
*(--sp_blinky2) = 0x0000000BU; /* R11 */
*(--sp_blinky2) = 0x0000000AU; /* R10 */
*(--sp_blinky2) = 0x00000009U; /* R9 */
*(--sp_blinky2) = 0x00000008U; /* R8 */
*(--sp_blinky2) = 0x00000007U; /* R7 */
*(--sp_blinky2) = 0x00000006U; /* R6 */
*(--sp_blinky2) = 0x00000005U; /* R5 */
*(--sp_blinky2) = 0x00000004U; /* R4 */
while (1) {
}
//return 0;
}
|
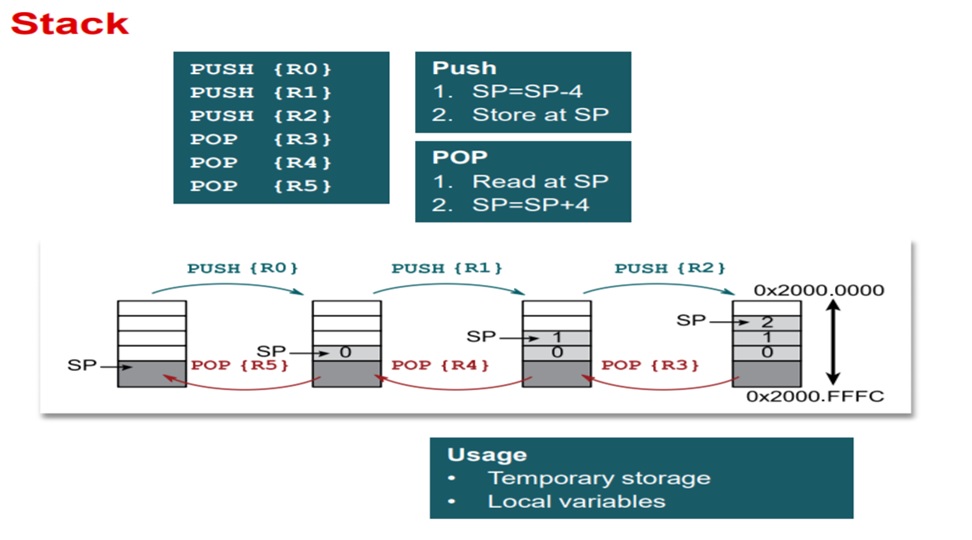
Analicemos varios asuntos del código anterior. La línea uint32_t stack_blinky1[40]; declara el stack para la tarea1.
la línea uint32_t *sp_blinky1 = &stack_blinky1[40]; inicializa el stack pointer para la tarea1. El stack es de 40
palabras de 32 bits y si inicializa en la palabra 41, es decir, una palabra por fuera del stack. La siguiente figura
ilustra el funcionamiento del stack para el microcontrolandor en cuestión e ilustra la razón para inicializar el
stack pointer de esta manera ya que al hacer una operación push primero se decrementa el stack pointer y luego
se almacena el dato en el stack.
Las siguientes líneas de código sirven para inicializar el stack de cada tarea. Note que se guardarán los registros
de la CPU xPSR,PC,LR,R0-R3, R12:
37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 | /* fabricate Cortex-M ISR stack frame for blinky1 */
*(--sp_blinky1) = (1U << 24); /* xPSR */
*(--sp_blinky1) = (uint32_t)&main_blinky1; /* PC */
*(--sp_blinky1) = 0x0000000EU; /* LR */
*(--sp_blinky1) = 0x0000000CU; /* R12 */
*(--sp_blinky1) = 0x00000003U; /* R3 */
*(--sp_blinky1) = 0x00000002U; /* R2 */
*(--sp_blinky1) = 0x00000001U; /* R1 */
*(--sp_blinky1) = 0x00000000U; /* R0 */
/* additionally, fake registers R4-R11 */
*(--sp_blinky1) = 0x0000000BU; /* R11 */
*(--sp_blinky1) = 0x0000000AU; /* R10 */
*(--sp_blinky1) = 0x00000009U; /* R9 */
*(--sp_blinky1) = 0x00000008U; /* R8 */
*(--sp_blinky1) = 0x00000007U; /* R7 */
*(--sp_blinky1) = 0x00000006U; /* R6 */
*(--sp_blinky1) = 0x00000005U; /* R5 */
*(--sp_blinky1) = 0x00000004U; /* R4 */
|
Inicialmente ninguna de las tareas funcionará porque el programa se quedará infinitamente en el ciclo
while (1) { }. Para comenzar la ejecución de las tareas, debemos detener el programa justo antes de retornar de
SysTick_Handler. Restaruramos los registros R4-R11 (inicialmente con basura porque es la primera vez
que ejecutamos la tarea1). Ajustamos el stack pointer de la tarea 1 para que apunte a R0 y asignamos el SP de la CPU
con el valor del stack pointer de la tarea1. Una vez se reanuda el programa se debe ejecutar la tarea1.
Para ejecutar la tarea2, volvemos a detener el programa, pero esta vez al inicio de la interrupción SysTick_Handler.
En este punto, tendremos salvados en el stack de la tarea1 los registros xPSR,PC,LR,R0-R3, R12
(estos los salva la interrupción automáticamente). Ahora debemos salvar en el stack de la tarea1 el resto de registros
de la CPU, es decir, R4-R11 (comenzando por R11) y ajustar el valor del stack pointer de la tarea1 al último
registro salvado. Justo antes de retornar de la interrupción debemos restaurar los registros R4-R11 de la tarea2
(la primera vez con basura, luego si tendrá los valores apropiados), colocamos el stack pointer de la tarea2 apuntando a
R0 y asignamos el SP de la CPU con el valor del stack pointer de la tarea2. Al retornar de SysTick_Handler se
ejecutará la tarea2. Este proceso se repetirá indefinidamente. Claramente se observa que este procedimiento manual es
tedioso, pero como ya se mencionó se puede automatizar completamente por software. Ese es el trabajo del kernel del RTOS.
Ejercicio¶
Escriba cómo sería el algoritmo para implementar el kernel que funcione como previamente se describió. Pregunta Juanito: ¿Es posible implementar el algoritmo utilizando 100 % código C? ¿Será necesario escribir algo de código ensamblador?
Note
Los ejemplos anterior y algunas figuras son tomados de un excelente curso ofrecido por Miro Samek.